Project Information
- Project Name: LiDAR SLAM and Particle Filter Map Localization
- Class: RBE3002
- Project Date: Fall 2022
Project Description & Contributions
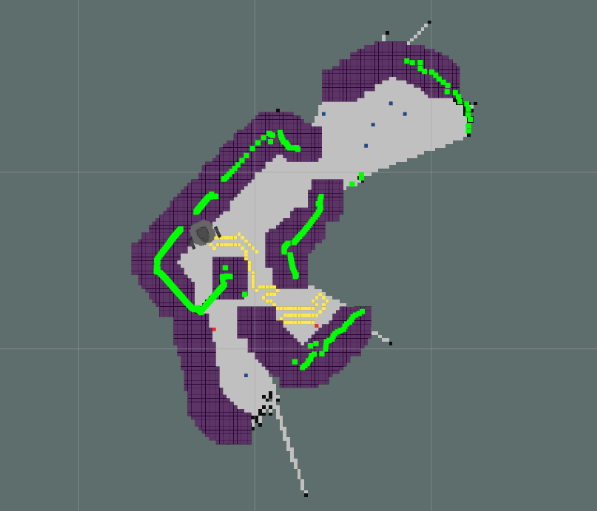
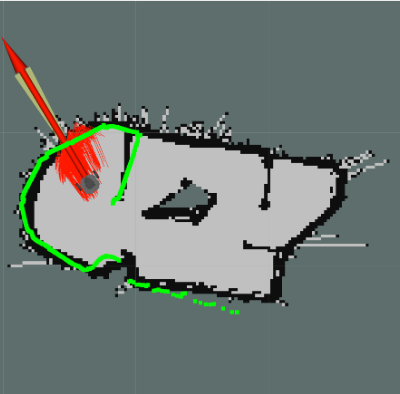
The objective of this project was to implement SLAM using a LiDAR on a turtlebot running ROS to fully map an unknown environment, while avoiding any collisions. Upon doing so, the robot will be moved to an unknown location in the environment and then be required to navigate to a designated goal point.
- Team Leader
- Implemented basic trajectory navigation using PID control
- Implemented A* Path Planning
- Implemented frontier/boundary exploration
- Implemented LiDAR SLAM
- Implemented Map localization using a Particle Filter