Project Information
- Project Name: Color Sorting Pick and Place Robot Arm
- Class: 3001
- Project date: Fall 2022
- Project Demo: link
Project Description & Contributions
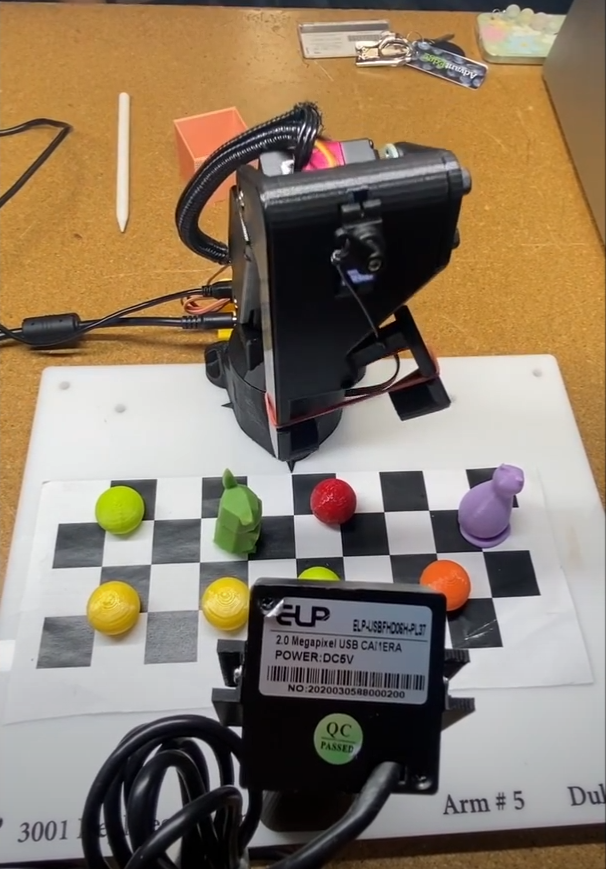
The objective of this project is to program the 6DOF robot arm to successfully pick up the color objects and place them in various locations. This requires a robust trajectory planning protocol and then the use of the camera to identify the locations of the objects to then manipulate them effectively.
- Team Leader
- Matlab Scripting
- Inverse Kinematics calculations using Jacobian and DH
- Computer Vision w/ Camera intrinsics calibration, Color Mask, and PnP